 Get in touch
Get in touch

1. Inledning: Dekonstruktion av AC-induktionsmotorhästkrafter AC-induktionsmotorn är en av de m...
LÄS MERBranschnyheter
2026-04-21
En DC (likström) motor omvandlar elektrisk energi till mekanisk rotation med hjälp av interaktionen mellan ett magnetfält och en strömförande ledare. Funktionsprincipen följer av Lorentz kraftlag: när elektrisk ström flyter genom en ledare placerad inuti ett magnetfält, upplever ledaren en kraft vinkelrät mot både strömriktningen och fältriktningen. Ordna tillräckligt med strömförande ledare i en roterande enhet och den kraften blir kontinuerligt roterande vridmoment.
Rent praktiskt innehåller en DC-motor två grundläggande magnetiska system. Den stator ger ett stationärt magnetfält — antingen från permanentmagneter eller elektromagneter (fältlindningar). Den rotor (även kallat ankaret) bär ledare anslutna till en extern likströmskälla. Ström som flyter genom rotorledarna reagerar med statorfältet för att generera vridmoment och roterar rotorn. Så länge som likspänning påläggs fortsätter motorn att rotera.
Hastigheten i en DC-motor styrs i första hand av den pålagda spänningen: högre spänning ger snabbare rotation. Vridmomentet är proportionellt mot ankarströmmen. Detta enkla förhållande mellan spänning, ström, hastighet och vridmoment gör likströmsmotorer exceptionellt lätta att styra över ett brett driftsområde - en egenskap som förklarar deras fortsatta dominans i applikationer med variabel hastighet.
Den interna arkitekturen hos en DC-motor varierar mellan borstade och borstlösa konstruktioner, men flera kärnkomponenter är gemensamma för båda typerna.
Statorn är den stationära yttre enheten av motorn. I likströmsmotorer med små och bråkdelar hästkrafter produceras statorfältet av permanentmagneter som är fästa i motorhusets inre hål. I större industriella DC-motorer bär statorn fältlindningar - trådspolar lindade runt polstycken - genom vilka en separat DC-excitationsström flyter för att skapa magnetfältet. Statorramen är vanligtvis laminerat kiselstål för att minimera virvelströmsförluster.
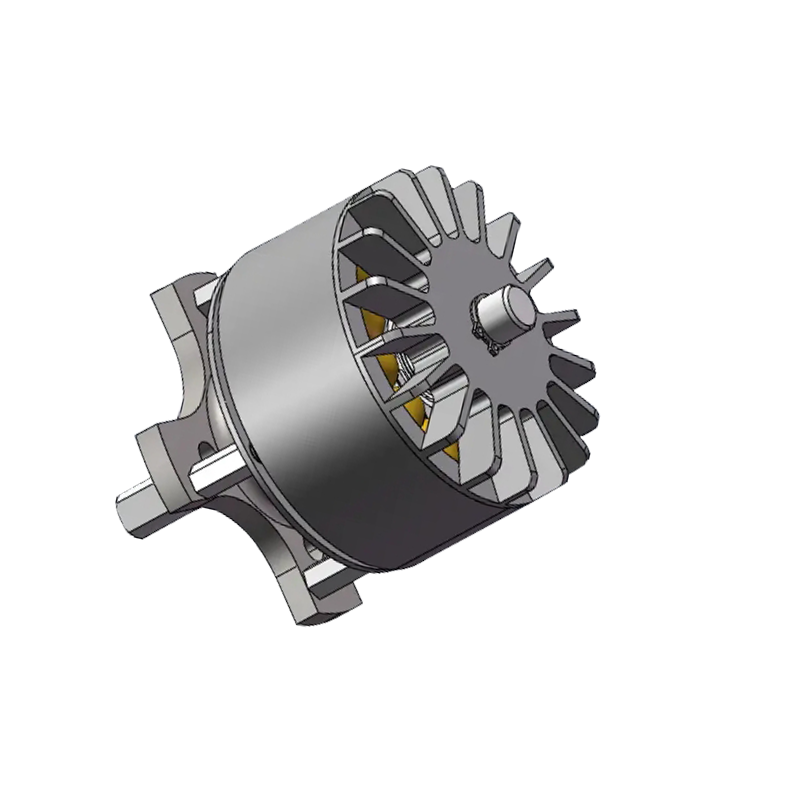
Rotorn är den roterande enheten monterad på motoraxeln. Den består av en laminerad järnkärna med slitsar bearbetade runt dess omkrets, i vilka ankarlindningarna är lindade. Den laminerade konstruktionen minskar virvelströmsförlusterna i strykjärnet. I borstade DC-motorer bär rotorn de lindade spolarna; i borstlösa DC-motorer bär rotorn istället permanentmagneterna.
Kommutatorn är en segmenterad kopparring monterad på rotoraxeln. Varje segment ansluts till en annan ankarspole. Kolborstar – fjäderbelastade kontakter monterade i statorhuset – trycker mot kommutatorytan och bibehåller elektrisk kontakt när axeln roterar. När rotorn vrider sig passerar kommutatorsegmenten under borstarna i sekvens och växlar automatiskt strömriktningen i varje spole vid rätt ögonblick för att hålla vridmomentet i en konsekvent rotationsriktning. Denna mekaniska omkoppling är vad som definierar en borstad DC-motor.
Armaturlindningar är isolerade kopparledare lindade i rotorslitsarna. Lindningskonfigurationen - varv, våg eller simplex - bestämmer antalet parallella strömbanor genom ankaret och påverkar motorns hastighet-vridmomentegenskaper. Fältlindningar på statorn, när sådana finns, lindas för att producera det korrekta antalet magnetiska poler för designhastigheten och vridmomentområdet.
Den utgående axeln överför mekaniskt vridmoment till lasten. Precisionskullager eller hylslager stödjer axeln i vardera änden av huset och håller luftgapet mellan rotor och stator inom snäva toleranser. Huset (ändklockor och ram) ger strukturellt stöd, skyddar interna komponenter och innehåller i vissa utföranden kylflänsar eller monteringsanordningar för en extern fläkt.
I en borstad likströmsmotor utför kommutatorn och borstarna strömkopplingsfunktionen mekaniskt. När ankaret roterar, rör sig kommutatorsegmenten förbi de stationära borstkontakterna och ansluter varje ankarspole till matningen i sekvens. Detta säkerställer att oavsett rotorposition, spolen som för närvarande är inriktad med statorns polgap alltid bär ström i rätt riktning för att producera vridmoment framåt.
Resultatet är en motor som går direkt från en likströmskälla utan att någon extern elektronisk kommutering krävs. Anslut en borstad DC-motor till ett batteri eller reglerad DC-försörjning och den roterar omedelbart. Vänd polariteten och den ändrar riktning. Denna enkelhet är den främsta anledningen till att borstade motorer fortfarande används i stor utsträckning i kostnadskänsliga applikationer med låg till medelhög komplexitet.
Den mekaniska kontakten mellan borstar och kommutator introducerar motorns viktigaste begränsningar. Borst-kommutatorfriktion genererar värme och slitageskräp, och bågbildningen som uppstår när segmentbytet ger elektromagnetisk interferens (EMI). Borstbyte krävs vanligtvis var 1 000–5 000 drifttimme beroende på aktuell belastning, hastighet och driftsmiljö. Kommutatorytan kräver också periodisk inspektion och ytbeläggning.
Borstade likströmsmotorer är inte lämpliga för användning i brandfarliga eller explosiva atmosfärer eftersom borstbågar kan antända omgivande gaser. De är också begränsade i maximal hastighet av de mekaniska begränsningarna för borst-kommutatorkontakten, som vanligtvis toppar vid 3 000–8 000 RPM i de flesta utföranden.

En borstlös DC-motor (BLDC) eliminerar kommutatorn och borstenheten helt genom att flytta permanentmagneterna till rotorn och lindningarna till statorn. Strömväxling – kommutering – hanteras elektroniskt av en motorstyrenhet som övervakar rotorns position genom Hall-effektsensorer eller bakåt-EMF-detektering och aktiverar statorspolarna i rätt sekvens för att upprätthålla rotation.
Denna arkitektoniska inversion har betydande konsekvenser för prestanda, underhåll och tillämpningsområde.
| Karakteristiskt | Borstad DC-motor | Borstlös DC-motor |
|---|---|---|
| Kommuteringsmetod | Mekanisk (borstar kommutator) | Elektronisk (kontrollersensorer) |
| Effektivitet | 75–85 % | 85–95 % |
| Underhåll | Regelbundet borstbyte krävs | Minimal — endast lager |
| Hastighetsområde | Upp till ~8 000 RPM typiskt | Upp till 100 000 RPM möjligt |
| EMI / bågbildning | Betydande borstbågbildning | Låg (ingen kontakt med borsten) |
| Lämplighet för farlig miljö | Inte lämplig (borstbågbildning) | Lämplig (ingen ljusbåge) |
| Krav på kontroller | Enkel DC-spänningskontroll | Dedikerad elektronisk styrenhet krävs |
| Enhetskostnad | Lägre | Högre (motorstyrning) |
| Livslängd | Begränsad av borstslitage | Längre — inga slitage kontaktdelar |
Effektivitetsfördelen med borstlösa motorer är särskilt betydande i batteridrivna applikationer. En drivlina eller elverktyg för elfordon som kör en BLDC-motor med 92 % verkningsgrad jämfört med en borstad motsvarighet på 80 % översätts direkt till längre drifttid per laddning och minskad termisk belastning på batteripaketet. Detta är den primära drivkraften bakom det nästan universella skiftet till borstlösa motorer i sladdlösa elverktyg, elfordon, drönare och HVAC-system under de senaste två decennierna.
Trots prestandafördelarna med borstlösa konstruktioner förblir borstade DC-motorer det korrekta valet i flera applikationskategorier.
En DC-motordrift (även kallad DC-enhet eller DC-styrenhet) är kraftelektronikpaketet som reglerar spänningen och strömmen som tillförs en DC-motor för att kontrollera dess hastighet, vridmoment, acceleration och riktning. Motorn och frekvensomriktaren bildar tillsammans ett komplett rörelsestyrningssystem — motorn ger mekanisk effekt, och frekvensomriktaren hanterar elektrisk ingång för att uppnå önskad rörelseprofil.
Traditionella borstade DC-frekvensomriktare använder tyristor (SCR) faskontroll eller PWM (pulsbreddsmodulering) tekniker för att reglera ankarspänning. En fyrkvadrantdrift kan styra hastighet och vridmoment i båda rotationsriktningarna, vilket möjliggör regenerativ bromsning - där motorn fungerar som en generator under retardation och återför energi till matningsbussen. Denna kapacitet används i stor utsträckning i industriella applikationer som lindningsmaskiner, valsverk och hissar där kontrollerad retardation och energiåtervinning spelar roll.
Varvtalsregleringens noggrannhet för en borstad DC-drivenhet med sluten slinga med en återkopplingssignal för varvräknare är typiskt ±0,1 % av inställd hastighet , vilket förklarar deras långa dominans inom precisionsindustriell rörelsestyrning innan AC-frekvensomriktare mognade på 1990-talet.
En BLDC-motorstyrenhet utför elektronisk kommutering genom att läsa rotorns position – via Hall-effektsensorer inbäddade i motorn eller genom sensorlös back-EMF-uppskattning – och växla ström genom statorfaserna i rätt sekvens. Styrenheten hanterar även PWM-driftcykeln för att reglera hastigheten och övervakar strömmen för att begränsa vridmomentet. Mer sofistikerade BLDC-drivenheter implementerar fältorienterad styrning (FOC), som optimerar vinkeln mellan statorfältet och rotormagneten för maximalt vridmoment per ampere över hela hastighetsområdet.
I integrerade rörelsesystem - såsom robotleder, servoaxlar och CNC-spindlar - är BLDC-motorn och dess drivning vanligtvis ihopparade och avstämda som en matchad uppsättning. Frekvensomriktarparametrar inklusive aktuell loopbandbredd, hastighetsloopförstärkning och kommuteringstid konfigureras under driftsättning och lagras i frekvensomriktarens beständiga minne.
Applikationslandskapet för borstade och borstlösa DC-motorer återspeglar deras respektive styrkor i kostnad, underhåll, hastighetsområde och kontrollprecision.
1. Inledning: Dekonstruktion av AC-induktionsmotorhästkrafter AC-induktionsmotorn är en av de m...
LÄS MER1. Introduktion Inom modern industriell automation, datacenterkonstruktion, konsumentelektronikuppgradering...
LÄS MERStegmotorer representerar en hörnsten i modern rörelsekontroll och erbjuder exakt positionering och re...
LÄS MERDet industriella motorlandskapet genomgår en betydande förvandling, driven av det obevekliga ...
LÄS MERRelaterade produkter
Byggnad 10, nr 199, Jinfeng Road, Suzhou High-tech, Jiangsu-provinsen, Kina
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Upphovsrätt © Suzhou Retek Electric Technology Co., Ltd. Alla rättigheter reserverade. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













